
深入探索,FreeRTOS C 任务调度的精妙实现之道

40
FreeRTOS C 是一款在嵌入式系统中广泛应用的实时操作系统内核,任务调度是其核心功能之一,掌握任务调度的实现方法对于开发者来说至关重要。
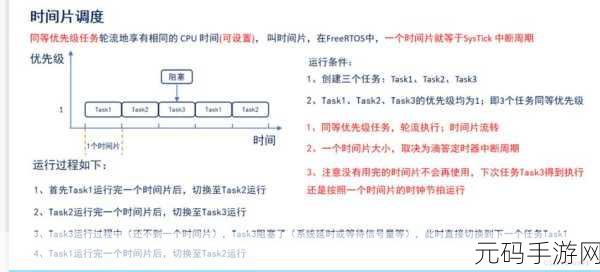
任务调度的目的是合理分配系统资源,确保各个任务能够按照预定的规则和优先级得到执行,在 FreeRTOS C 中,任务调度机制基于优先级和时间片轮转两种方式。
要实现 FreeRTOS C 的任务调度,需要先了解任务控制块(Task Control Block,TCB)的结构和作用,TCB 中包含了任务的状态、优先级、堆栈指针等重要信息,通过对 TCB 的操作,可以实现任务的创建、删除、挂起和恢复等功能。
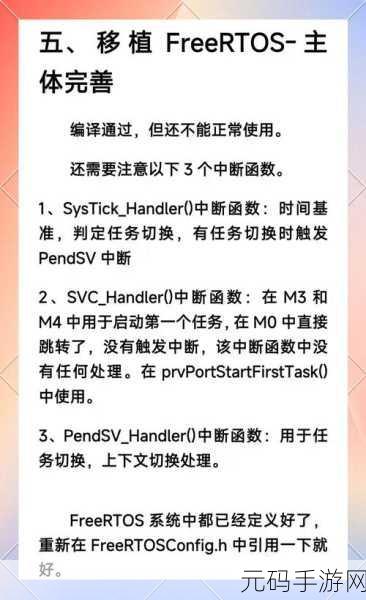
需要熟悉任务调度器的工作原理,FreeRTOS C 的任务调度器会在每个时钟节拍中断时进行任务切换的判断,如果当前运行任务的时间片用完或者有更高优先级的任务处于就绪状态,就会进行任务切换。
还需要注意任务的优先级设置,合理设置任务的优先级可以确保关键任务能够及时得到执行,提高系统的实时性和稳定性。
在实际开发中,还需要考虑任务之间的通信和同步机制,以避免出现资源竞争和死锁等问题。
掌握 FreeRTOS C 的任务调度实现方法需要对其原理和相关机制有深入的理解,并在实践中不断积累经验。
参考来源:相关技术文档及专业论坛交流。
最新文章

神仙道失却之阵等级上限突破,全新上限等级揭秘
2025-03-14
神武2五庄技能全解析,揭秘最强战斗秘籍
2025-03-14
泰拉瑞亚鱼鲨坐骑全攻略,获取、管理与价值最大化
2025-03-14
冰封奇境,猎怪新章——怪物猎人冰风探秘手游重大版本更新深度解析
2025-03-14
阴阳师记忆星盘揭秘,式神背景与动人故事深度探索之旅
2025-03-14
热门文章


草莓视频在线免费观看软件下载:1. 草莓视频在线免费观看:畅享海量影视资源的最佳选择
2024-12-25羞羞网站在线观看入口免费:1. 探索羞羞网站的无限精彩与乐趣
2024-12-2851黑料入口吃瓜:1. 51黑料入口揭秘:娱乐圈不为人知的秘密
2024-12-23
182TtV福利:1. 182TtV福利:全面提升您的生活品质与享受
2024-12-26
污污软件免费下载:1. "污污软件免费下载:畅享无限资源与乐趣
2024-12-31